Deployment and installation of the detection units and sea-floor network components is one of the most challenging aspect of the project. A dedicated tool – LOM for short – has been developed to deploy the detection units at depths of several kilometres.
(Graphics courtesy Marijn van der Meer/Quest)
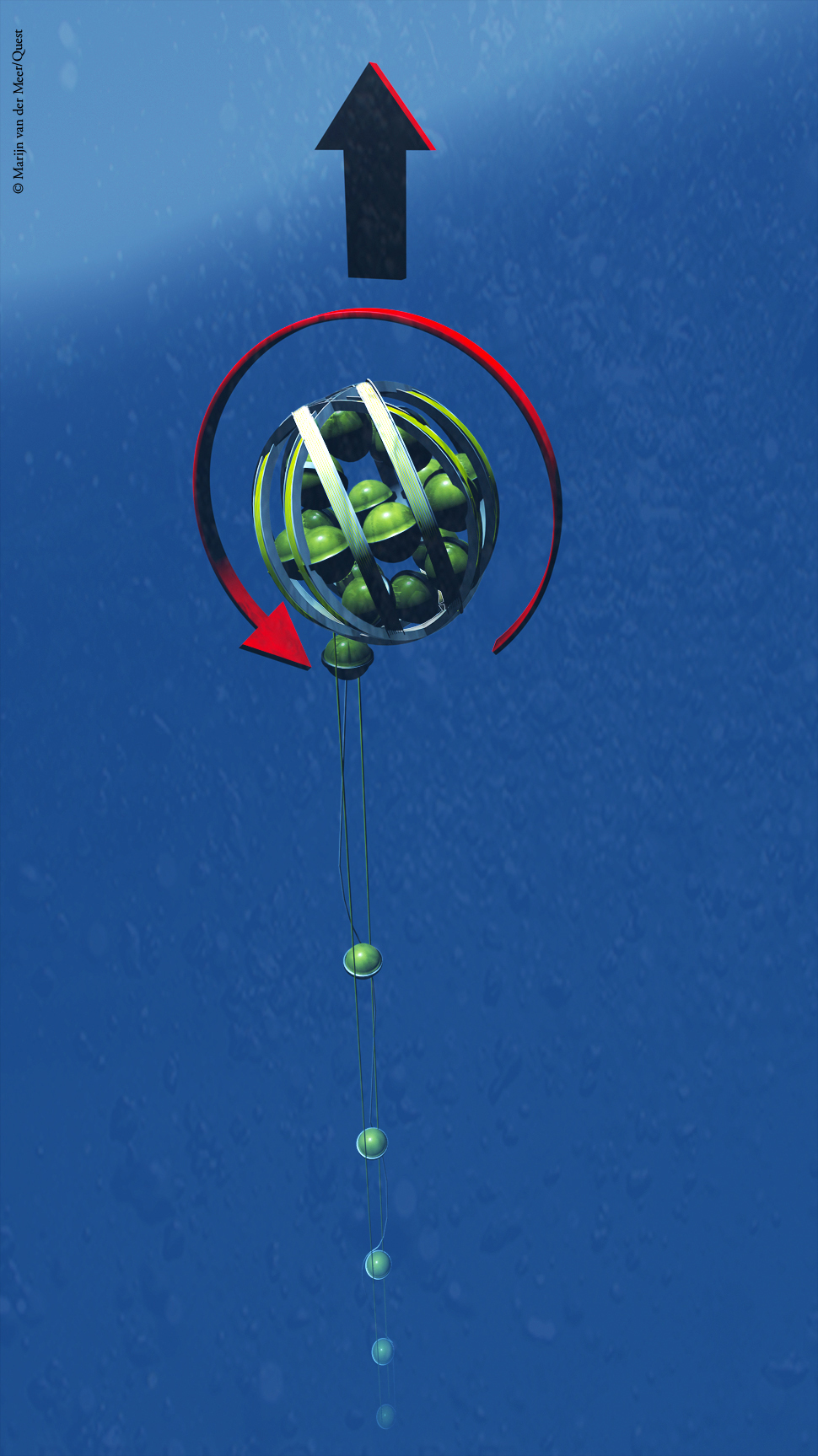
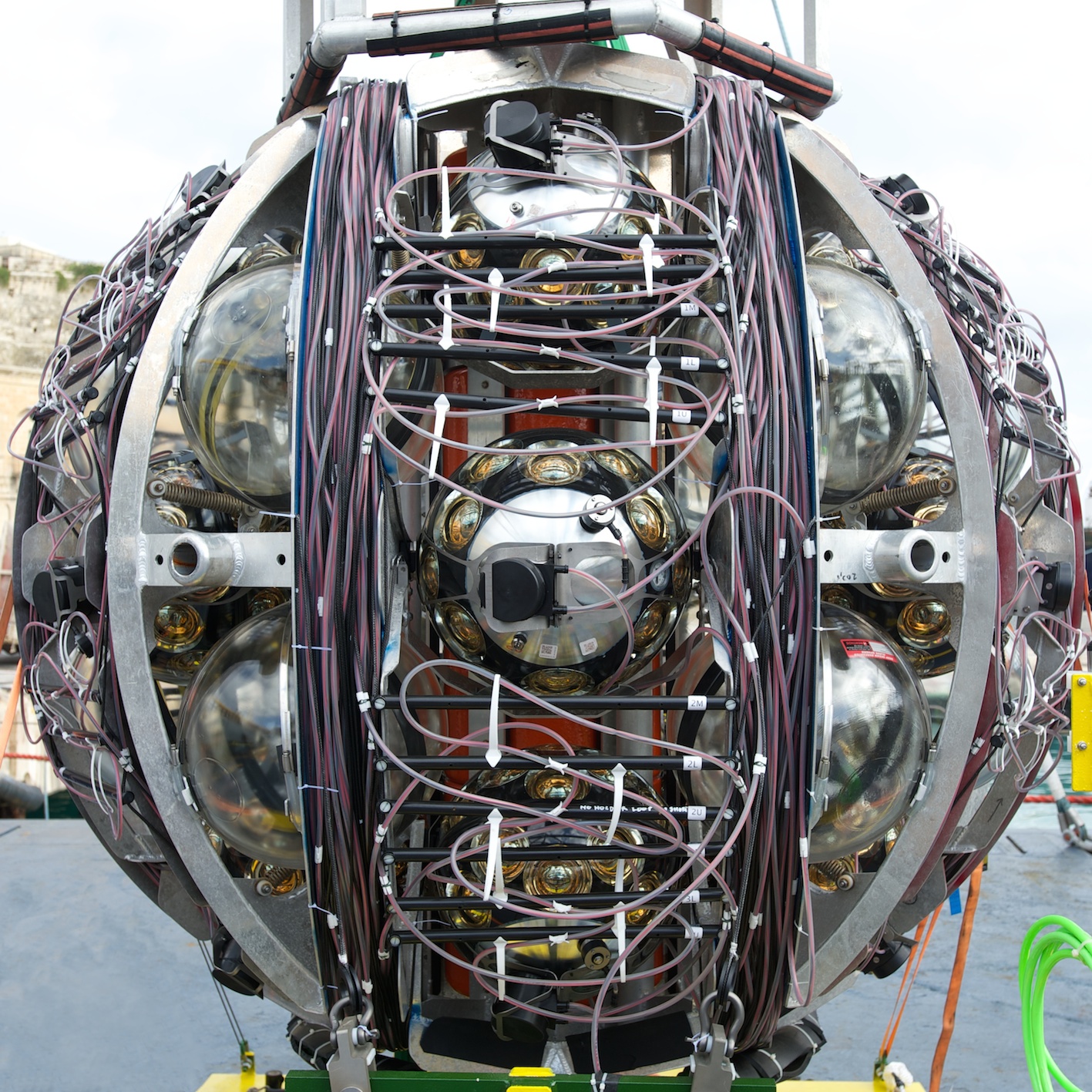
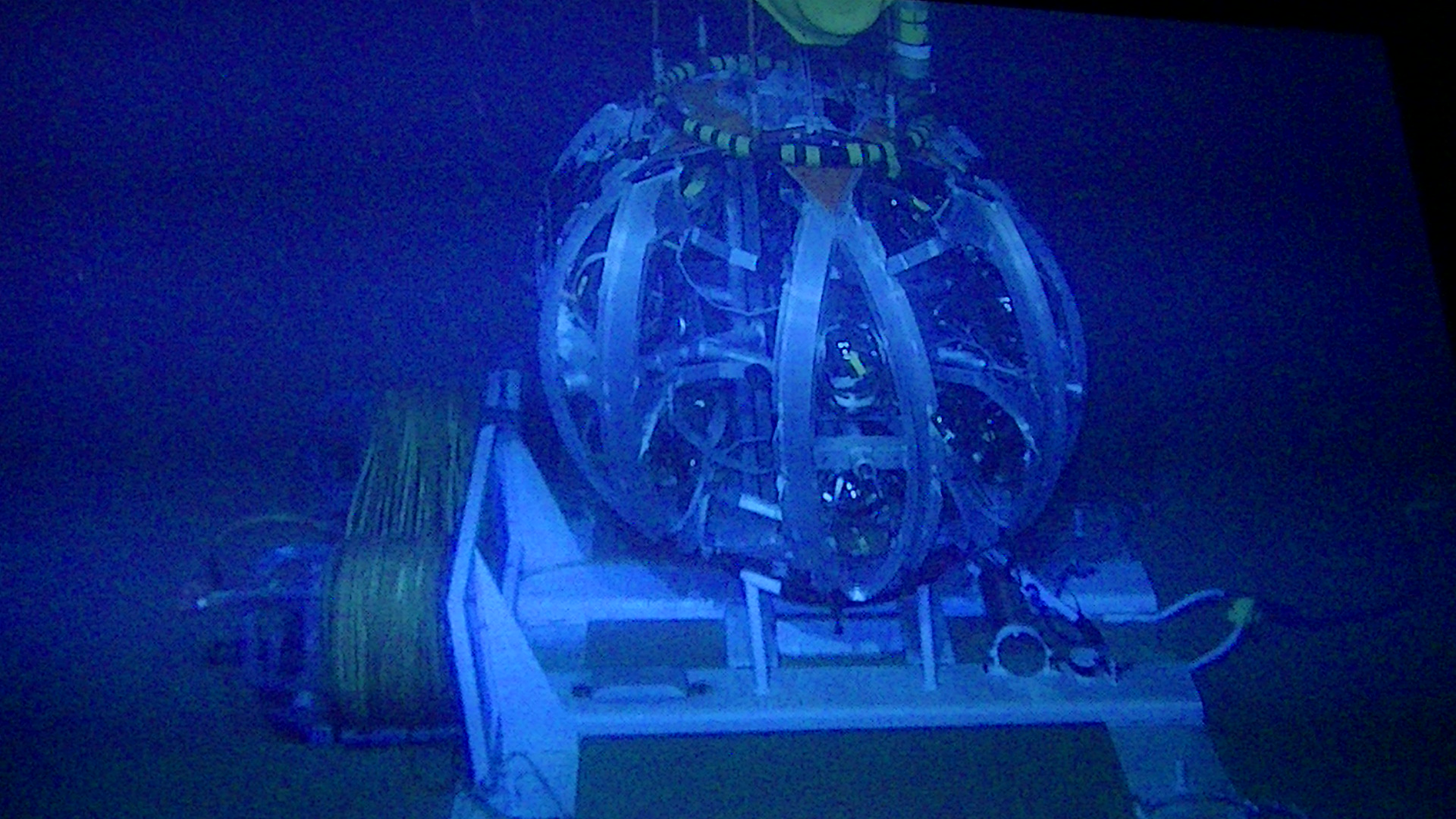
For deployment and storage, the string-like detection unit is coiled around a large, i.e. 2 m diameter, spherical frame, the so-called launcher vehicle of optical modules – or LOM for short, in which the sensor modules slot into dedicated cavities. The anchor at the bottom of the detection unit is the interface with the seabed infrastructure. It is external to the launcher vehicle and is sufficiently heavy to keep the detection unit fixed on the seabed. The anchor houses an interlink cable equipped with a wet-mateable connector and the base container. The base container incorporates an AC/DC power converter (in the case of the ORCA detector), dedicated optical components and an acoustic receiver used for positioning of the detector elements. A surface vessel, with dynamic positioning capability, is used to deploy the LOM with the detection unit at its designated position on the seabed with an accuracy of 1 m. A remotely operated vehicle (ROV) is used to deploy and connect the interlink cables from the base of a detection unit to the junction box or a previously deployed string in the daisy chain. Once the connection to the detection unit has been verified onshore, the self-unrolling of the unit is started once the deployment winch cable is removed. For this release mechanism, the LOM is fixed to a hook on the anchor-frame by a small sling, while two forks at the anchor-frame keep the LOM in the correct orientation. The hook is opened with a small ROV pulling a thin rope.
During this process, the launcher vehicle starts to rise to the surface while slowly rotating and releasing the sensor modules. The empty launcher vehicle floats to the surface and is recovered by the surface vessel. The use of compacted detection units allows for transportation of many units onboard and thus multiple deployments during a single cruise. This method reduces costs and time for detector installation.




![]()
Details in an article published in the peer-reviewed Journal of Instrumentation:
The KM3NeT Collaboration, S. Aiello et al.
Deep-sea deployment of the KM3NeT neutrino telescope detection units by self-unrolling
DOI: 10.1088/1748-0221/15/11/P11027